

PhD Defense
Safe planning under uncertainty using surrogate models
PhD, Computer Science, Stanford University, 2025
Theses
Safe planning under uncertainty using surrogate models

Robert J. Moss
Ph.D. thesis, Stanford University, 2025
Algorithms for efficient validation of black-box systems
Robert J. Moss
Master's thesis, Stanford University, 2021
Teaching

Decision Making Under Uncertainty using POMDPs.jl


Julia Academy
Textbooks
Algorithms for Validation
Mykel J. Kochenderfer, Sydney M. Katz, Anthony L. Corso, and Robert J. Moss
MIT Press, 2025
Publications (Selected)

Kov: Transferable and Naturalistic Black-Box LLM Attacks using Markov Decision Processes and Tree Search
Robert J. Moss
arXiv, 2024

ConstrainedZero: Chance-Constrained POMDP Planning Using Learned Probabilistic Failure Surrogates and Adaptive Safety Constraints
Robert J. Moss, Arec Jamgochian, Johannes Fischer, Anthony Corso, and Mykel J. Kochenderfer
International Joint Conference on Artificial Intelligence (IJCAI), 2024
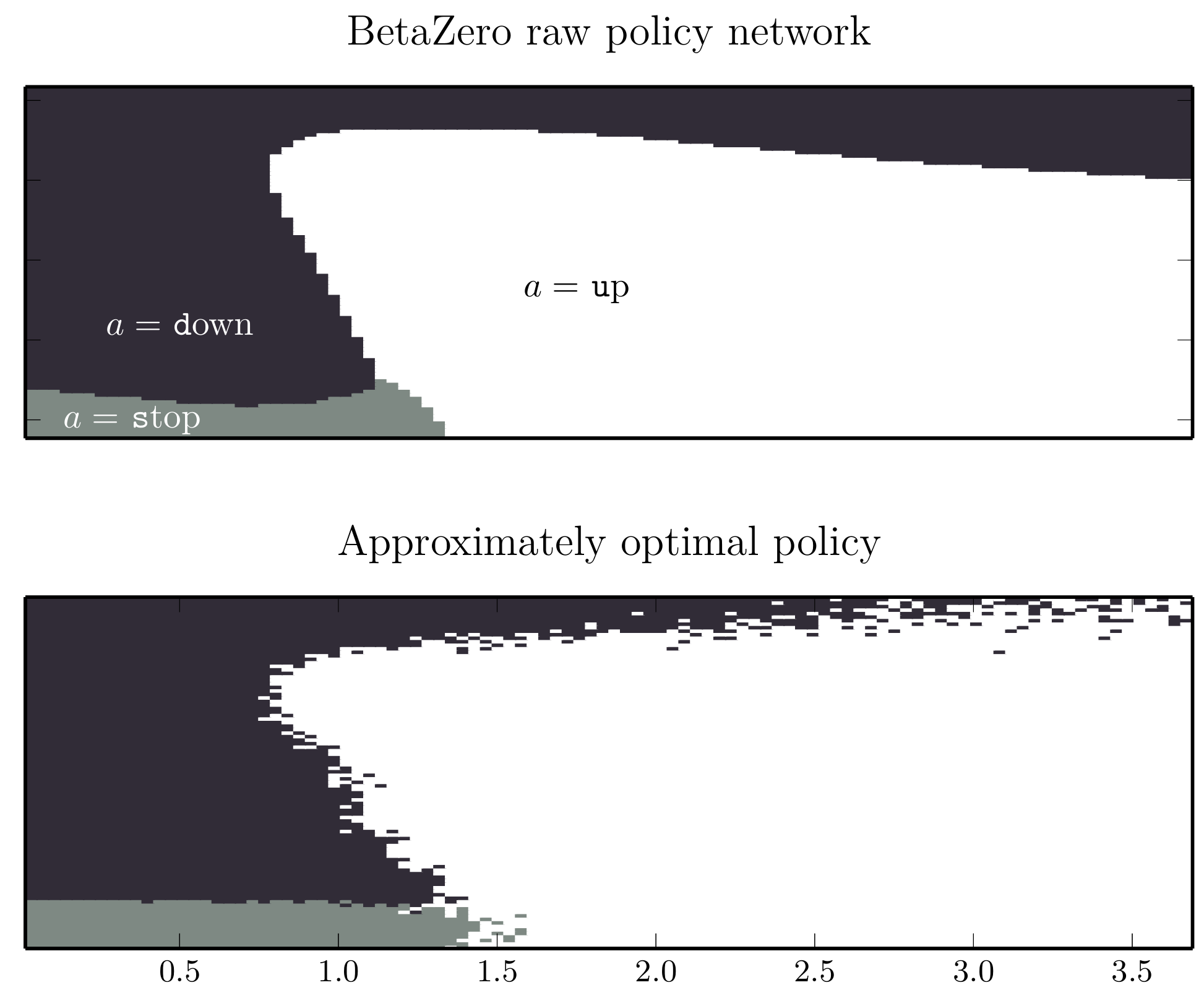
BetaZero: Belief-State Planning for Long-Horizon POMDPs using Learned Approximations
Robert J. Moss, Anthony Corso, Jef Caers, and Mykel J. Kochenderfer
Reinforcement Learning Journal (RLJ), 2024

Bayesian Safety Validation for Failure Probability Estimation of Black-Box Systems
Robert J. Moss, Mykel J. Kochenderfer, Maxime Gariel, and Arthur Dubois
Journal of Aerospace Information Systems (JAIS), 2023

A Survey of Algorithms for Black-Box Safety Validation of Cyber-Physical Systems
Anthony Corso, Robert J. Moss, Mark Koren, Ritchie Lee, Mykel J. Kochenderfer
Journal of Artificial Intelligence Research (JAIR), 2021

Autonomous Vehicle Risk Assessment
Robert J. Moss, Shubh Gupta, Robert Dyro, Karen Leung, Mykel J. Kochenderfer, Grace X. Gao, Marco Pavone, Edward Schmerling, Anthony Corso, Regina Madigan, Matei Stroila, and Tim Gibson
Stanford Center for AI Safety, 2021

Predictive Risk for Efficient Black-Box Validation of Autonomous Vehicles
Robert J. Moss
Stanford University (CS229: Machine Learning), 2021

Cross-Entropy Method Variants for Optimization
Robert J. Moss
arXiv, 2020

Adaptive Stress Testing of Trajectory Predictions in Flight Management Systems
Robert J. Moss, Ritchie Lee, Nicholas Visser, Joachim Hochwarth, James G. Lopez, and Mykel J. Kochenderfer
Digital Avionics Systems Conference (2020)

ACAS Xu: Integrated Collision Avoidance and Detect and Avoid Capability for UAS
Michael P. Owen, Adam Panken, Robert J. Moss, Luis Alvarez, and Charles Leeper
Digital Avionics Systems Conference (2019)
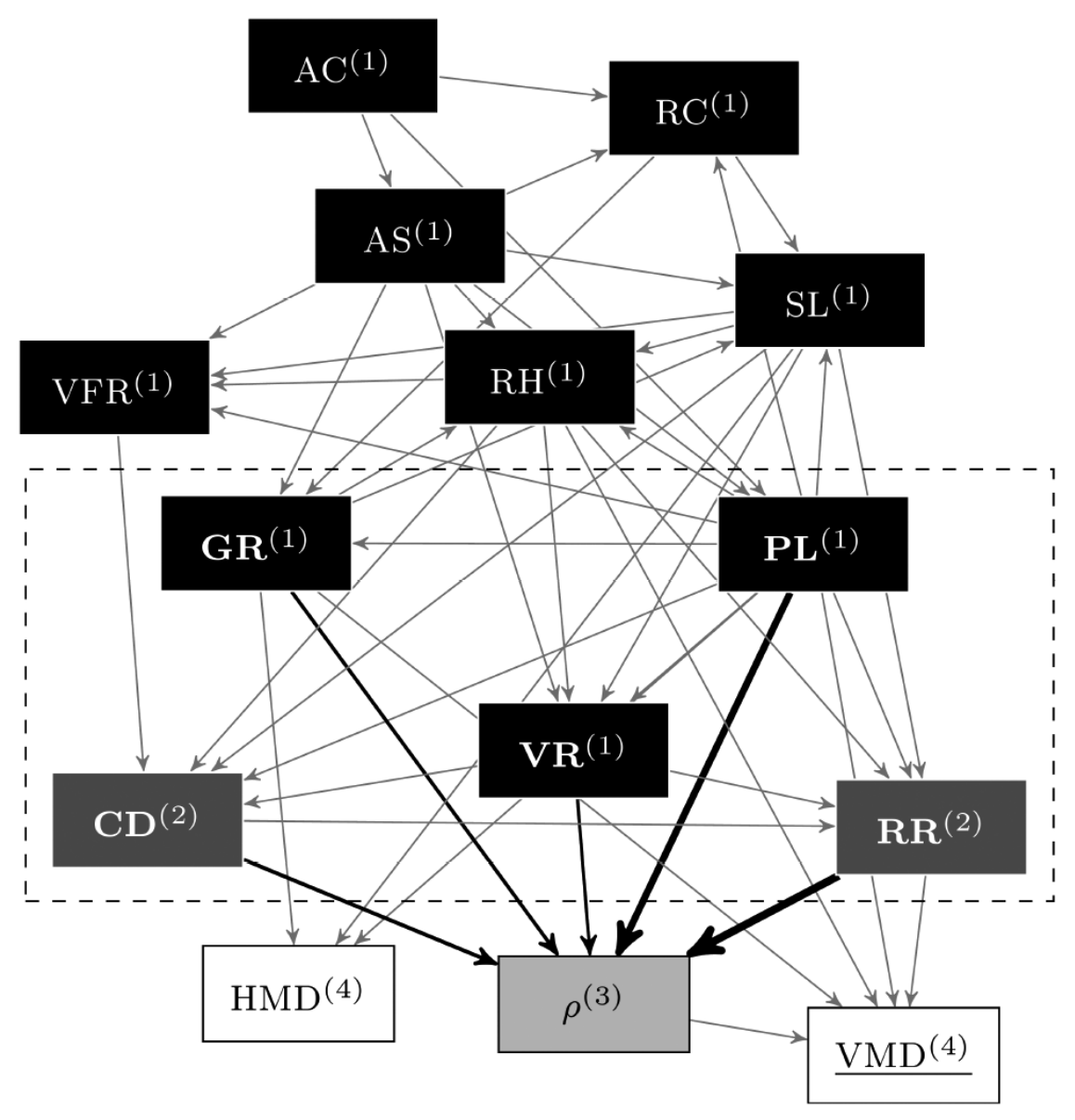
Bayesian Network Model of Pilot Response to Collision Avoidance Resolution Advisories
Edward H. Londner and Robert J. Moss
Journal of Air Transportation, Volume 26, Number 4 (2018), pp. 171–182
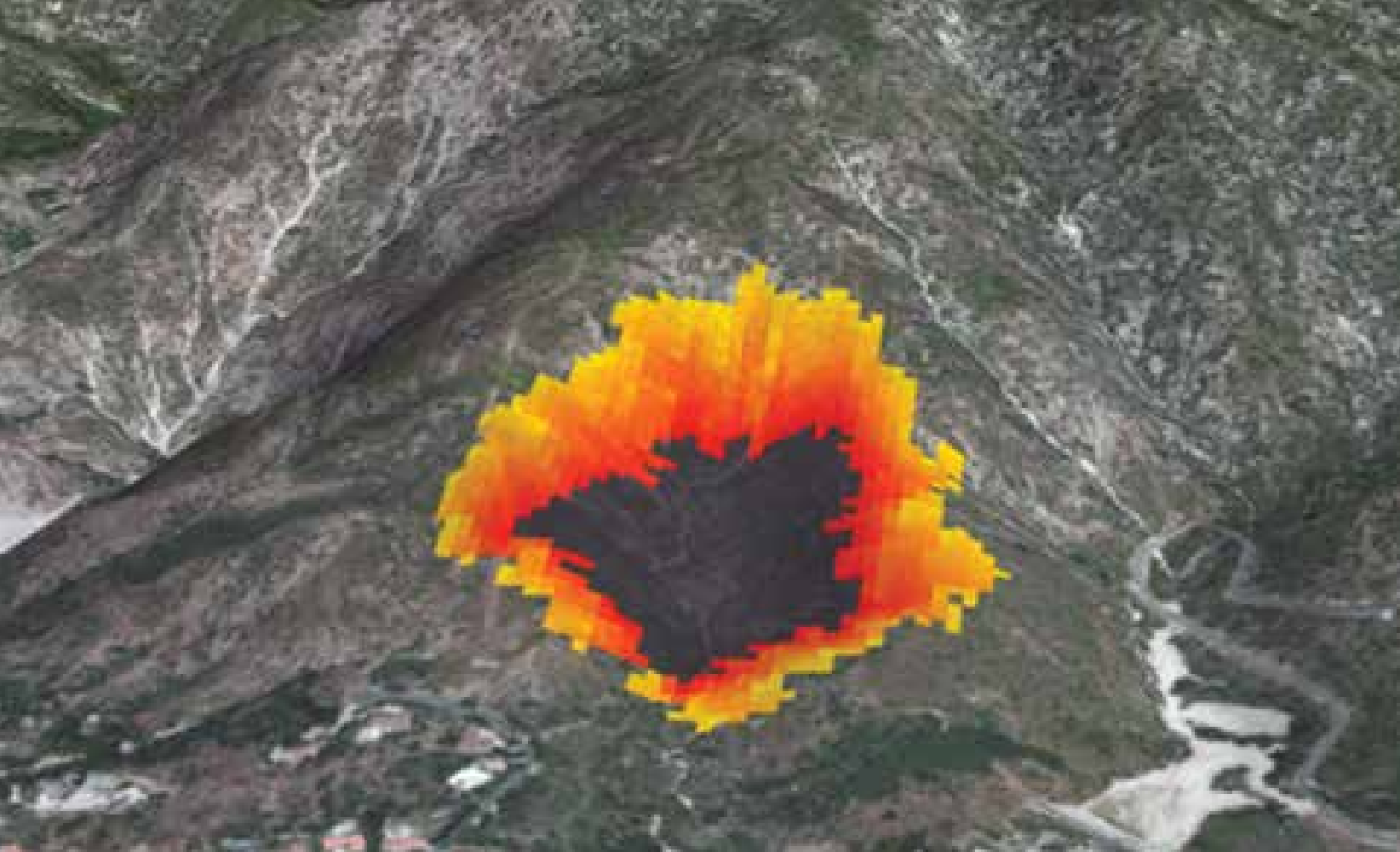
Automated Dynamic Resource Allocation for Wildfire Suppression
J. Daniel Griffith, Mykel J. Kochenderfer, Robert J. Moss, Velibor V. Mišić, Vishal Gupta, and Dimitris Bertsimas
Lincoln Laboratory Journal, Volume 22, Issue 2, pp. 38–59, 2017
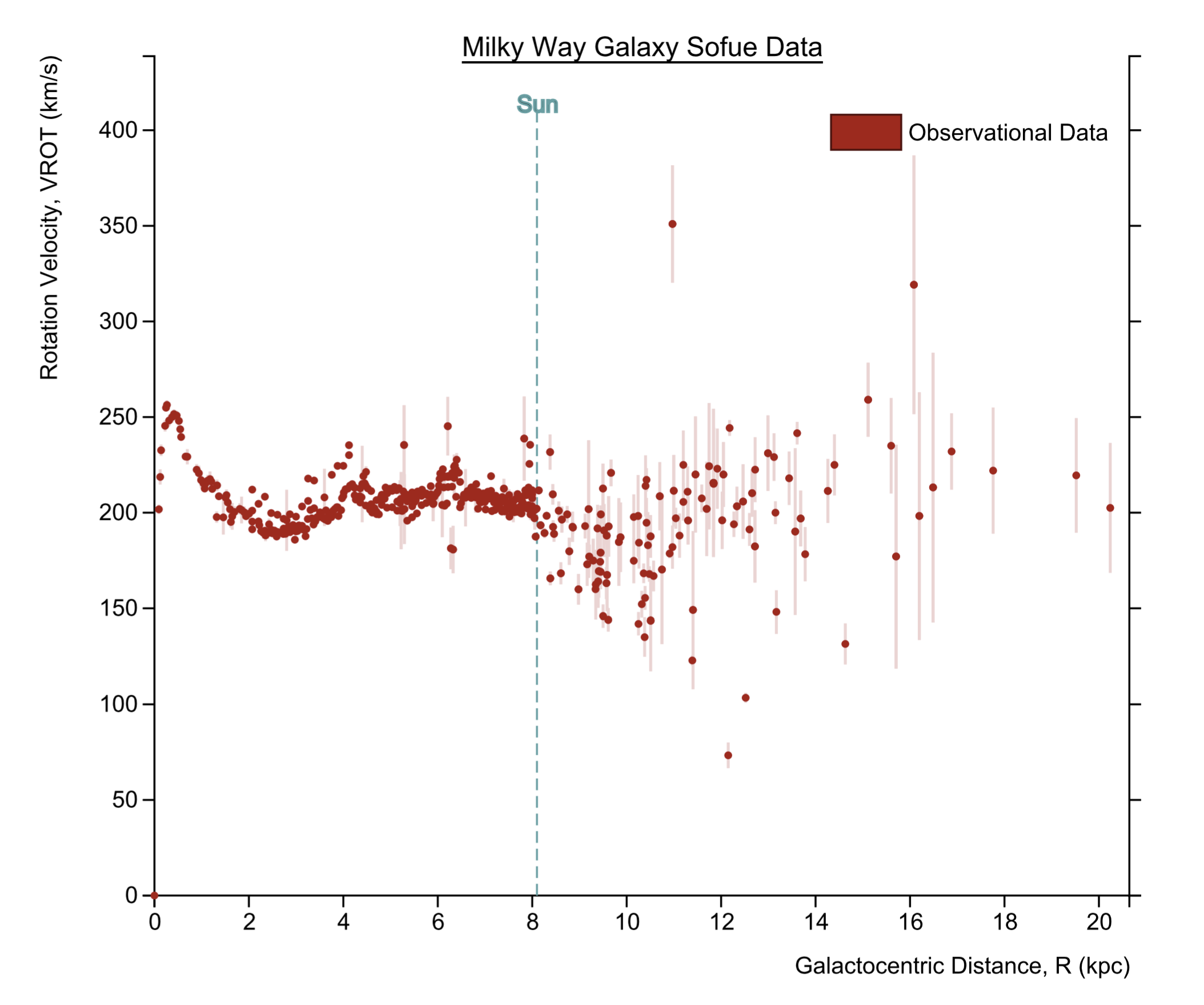
Rotation Curve for the Milky Way Galaxy in Conformal Gravity
James G. O'Brien and Robert J. Moss
Journal of Physics: Conference Series, Volume 615 012002, 2015
Using Julia as a Specification Language for the Next-Generation Airborne Collision Avoidance System
Robert J. Moss
JuliaCon, 2015